Center of Modern Control Techniques
and Industrial Informatics
Department of cybernetics and artificial intelligence (DCAI), FEEI, Technical University of Košice
Mitsubishi robot RV - 2SDB
 |
Room:
|
Brief description of the model
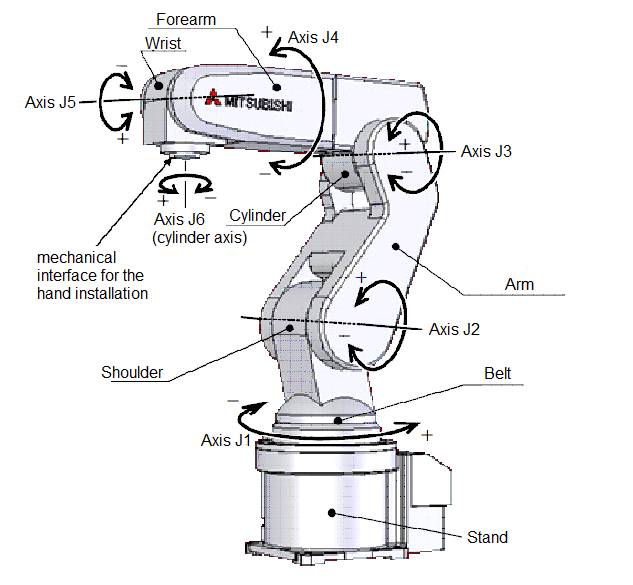
- industry robot with six degrees of freedom
- the length and shape of the arm are designed for optimum performance with a maximum reach being further extended yet the ability retained to cover work area near to the unit
- a greater operating radius is insured in applications calling for a ceilinghung unit, as well
- the robot has an enlarged swing area (-240 to +240 ), enabling the rear space to be put to good use, too
- maximum combined speed is 4,400 mm/sec. Furthermore, the speed at which the wrist section (secondary arm) moves is boosted to cut down on cycle time in assembly operation
- a positioning repeatability of as high as ±0.02 mm is realized. Highrigidity arm and active-gain control are combined to achieve a high straight-ahead motion accuracy
- robot comes standard with the following interfaces: Ethernet (TCP/IP), USB, RS-232, CC-Link, CRnQ, GOT
- the robot can also contain other interfaces, in this case robot contain the Profibus.
- part of the robot arm is pneumatic line and electrical wiring for robotic grippers
Gallery

|

|
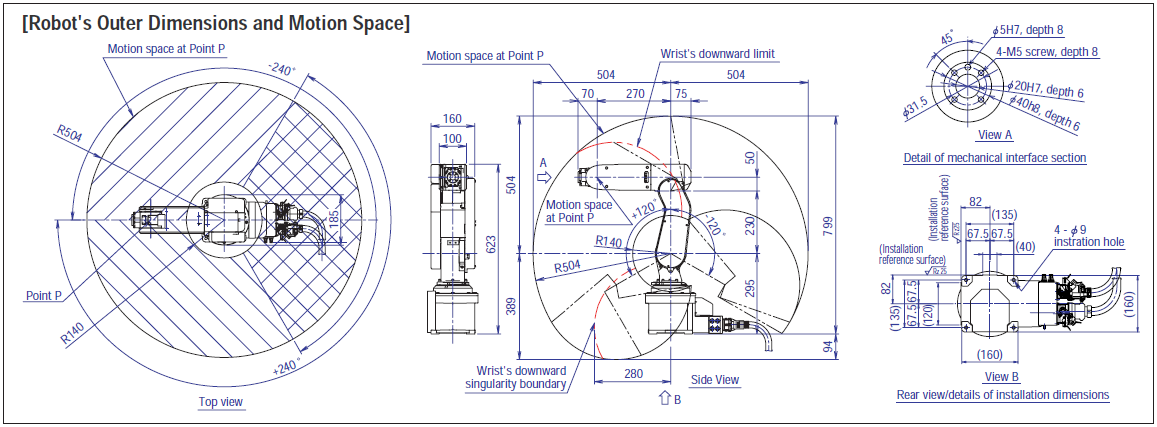
Robot's Outer Dimensions and Motion Space
Specification of robot arm
- Type: RV-2SDB
- Protection class: IP30
- Installation: Floorstanding, ceiling-hung, and wall-mounted
- Structure: Vertical articulated arm robot
- Degrees of freedom: 6
- Arm length: 230mm + 270mm
- Maximum reach radius: 504mm
- Operating range:
- J1: 480° (od -240° do +240°)
- J2: 240° (od -120° do +120°)
- J3: 160° (od 0° do +160°)
- J4: 400° (od -200° do +200°)
- J5: 240° (od -120° do +120°)
- J6: 720° (od -360° do +360°)
- Maximum angular velocity:
- J1: 225°/s
- J2: 150°/s
- J3: 275°/s
- J4: 412°/s
- J5: 450°/s
- J6: 720°/s
- Maximum composite speed: 4400mm/s
- Rated mass load capacity: 2kg
- Maximum mass load capacity: 3kg
- Position repeatability: 0,02 mm
- Mass: 19kg
Robot axes:
Using the model in pedagogy
courses
- Distributed Control Systems (1st grade master degree)
diploma theses
- PAPCUN, Peter: Control of robot integrated in flexible production line
(supervisor: doc. Ing.Ján Jadlovský CSc., consultant: Ing. Matej Čopík) - 2011 - ADAMONDY, Peter: Using Kinect device to control robot by human movement
(supervisor: doc. Ing.Ján Jadlovský CSc., consultant: Ing. Peter Papcun) - 2012 - DUPLINSKÝ, Tomáš: Robot control using the Android platform
(supervisor: doc. Ing.Ján Jadlovský CSc., consultant: Ing. Peter Papcun) - 2012
Using model in the research
dissertation theses
- PAPCUN, Peter:
Modeling and optimization of robotic and technological production lines
(supervisor: doc. Ing. Ján Jadlovský, CSc.) - 2014 (in preparation) publications
-
2012
-
PAPCUN, P. - ČOPÍK, M. - ILKOVIČ, J.: Control of robot integrated in flexible production line. In: Electroscope – online časopis pro elektrotechniku, ročník 2012, číslo II. ISSN 1802-4564,(ADE)

ILKOVIČ, J. - PAPCUN, P.: Material flow in Flexible Assembly Company. In: SCYR 2012 : 12th Scientific Conference of Young Researchers of Faculty of Electrical Engineering and Informatics Technical University of Košice: proc. - Košice: FEI TU, 2012 S. 177-180. - ISBN 978-80-553-0943-9. (AFD)
PAPCUN, P. - ČOPÍK, M.: Remote control of Mitsubishi industrial robot. In: SCYR 2012 : 12th Scientific Conference of Young Researchers of Faculty of Electrical Engineering and Informatics Technical University of Košice: proc. - Košice: FEI TU, 2012 S. 212-215. - ISBN 978-80-553-0943-9. (AFD)
DUPLINSKÝ, T. – PAPCUN, P. – JADLOVSKÝ, J.: Robot control using the Android platform. In: Electrical Engineering and Informatics 3 : Proceeding of the Faculty of Electrical Engineering and Informatics of the Technical University of Košice. Košice, FEI TU, 2012 - ISBN 978-80-553-0890-6. (AED)
ADAMONDY, P. – PAPCUN, P. – JADLOVSKÝ, J.: Using Kinect device to control robot by human movement. In: Electrical Engineering and Informatics 3 : Proceeding of the Faculty of Electrical Engineering and Informatics of the Technical University of Košice. Košice, FEI TU, 2012 - ISBN 978-80-553-0890-6. (AED)
Profile
Infrastructure
Laboratories
Members
Courses
Models
- 32-bit single-chip product
- Flexible Assembly Company
- Ball & Plate CE151
- Ball & Plate B&P_KYB
- Helicopter
- Hydraulic system
- Video camera system
- Crossroad model
- Rotary pendulum
- Magnetic levitation
- Khepera II Mobile robot (simulation approach)
- Motor & frequency converter
- Tracked mobile robot
- Flexible Manufacturing System
- Shelf stacker
- Mitsubishi robot
- SEF robot
- Robot soccer player for MiroSot category
- Robotized workplace
- Light system
- Tensometric (strain) scales
Research
CERN
Gallery
Partners
