Centrum moderných metód riadenia
a priemyselnej informatiky
Katedra kybernetiky a umelej inteligencie, FEI, Technická Univerzita v Košiciach
Robot Mitsubishi RV - 2SDB (výskumný model)
 |
Miestnosť:
|
Stručná charakteristika modelu
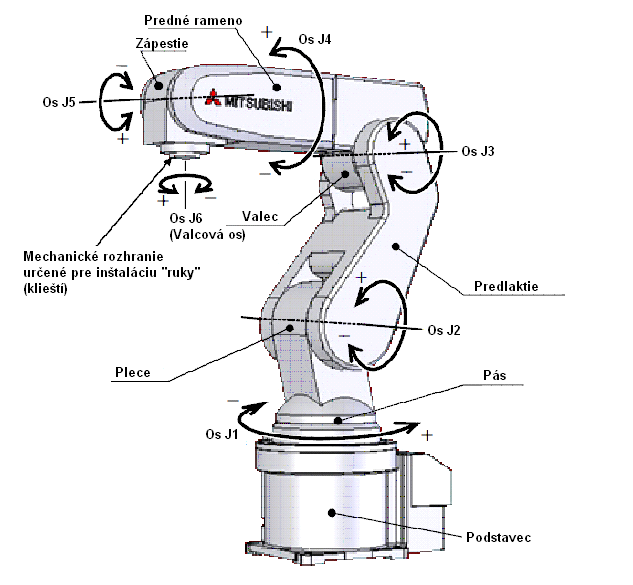
- priemyselný robot so 6 stupňami volnosti
- dĺžka a tvar ramena je navrhnutý pre optimálny výkon s maximálnym dosahom
- možnosť pokrytia pracovnej plochy v blízkosti jednotky
- prekročenie operačného priestoru je ošetrené software-ovým obmedzením
- robot má rozšírenú oblasť (-240° až 240°), umožňujúcu prácu v zadnom priestore
- robot sa štandardne dodáva s týmito rozhraniami: Ethernet (TCP/IP), USB, RS-232, CC-Link, CRnQ, GOT
- robot môže obsahovať aj iné rozhrania, v tomto prípade je to ProfiBus
- súčasťou ramena robota sú aj rozvody pneumatického a elektrického signálu pre uchopovaciu hlavicu
Galéria

|

|
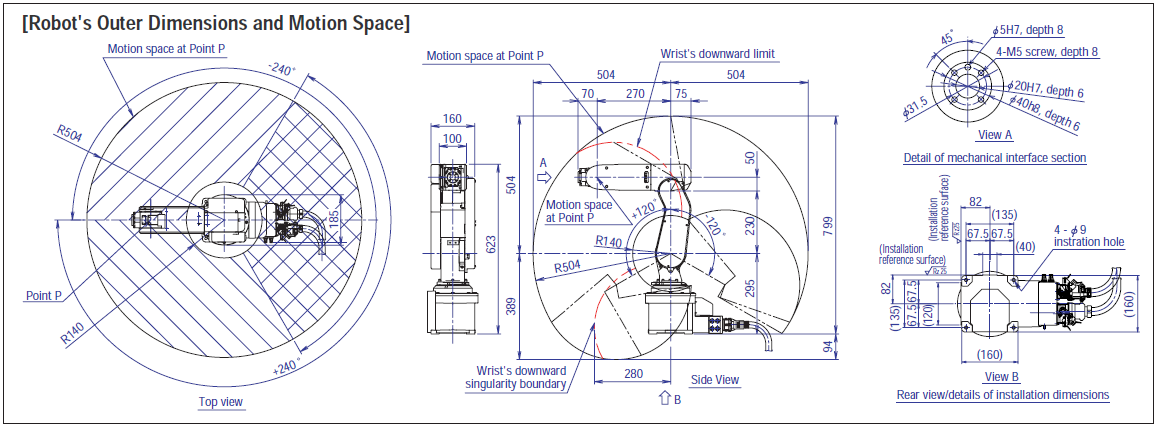
Pracovný priestor robota a jeho rozmery
Základné vlastnosti robota
- Typ: RV-2SDB
- Trieda ochrany: IP30
- Inštalácia: visiaca (na strope), priama (na podstavci), kolmá (na stenu)
- Štruktúra: Vertikálne kĺbové robotické rameno
- Stupne voľnosti: 6
- Dĺžka ramena: 230mm + 270mm
- Maximálny dosiahnuteľný polomer: 504mm
- Operačný rozsah:
- J1: 480° (od -240° do +240°)
- J2: 240° (od -120° do +120°)
- J3: 160° (od 0° do +160°)
- J4: 400° (od -200° do +200°)
- J5: 240° (od -120° do +120°)
- J6: 720° (od -360° do +360°)
- Maximálna uhlová rýchlosť:
- J1: 225°/s
- J2: 150°/s
- J3: 275°/s
- J4: 412°/s
- J5: 450°/s
- J6: 720°/s
- Maximálna rýchlosť: 4400mm/s
- Odporúčaná nosnosť: 2kg
- Maximálna nosnosť: 3kg
- Presnosť: 0,02 mm
- Váha: 19kg
Osi robota:
Využitie modelu v pedagogickom procese
predmety
- Distribuované systémy riadenia (1.ročník Ing. štúdia)
riešené bakalárske práce
- SLEZÁK, M.:
Simulačný model robota MITSUBISHI MELFA RV-2DB v prostredí Matlab/Simulink s toolboxom Simmechanics
(školiteľ: doc. Ing. Ján Jadlovský, CSc.) - 2016 riešené diplomové práce
- PAPCUN, Peter: Riadenie robota integrovaného v pružnej výrobnej linke
(vedúci ZP: doc. Ing.Ján Jadlovský CSc., konzultant ZP: Ing. Matej Čopík) - 2011 - ADAMONDY, Peter: Riadenie robota rozpoznavaním ľudských pohybov pomocou zariadenia Kinect
(vedúci: doc. Ing.Ján Jadlovský CSc., konzultant ZP: Ing. Peter Papcun) - 2012 - DUPLINSKÝ, Tomáš: Riadenie robota pomocou platformy Android
(vedúci: doc. Ing.Ján Jadlovský CSc., konzultant ZP: Ing. Peter Papcun) - 2012 - NAGY, Erik: Riadenie robota integrovaného vo flexibilnom montážnom podniku
(vedúci: doc. Ing.Ján Jadlovský CSc., konzultant ZP: Ing. Peter Papcun) - 2013 - RAČEK, D.:
Návrh knižnice simulačných modelov robotických manipulátorov v jazyku Matlab
(školiteľ: doc. Ing. Anna Jadlovská, PhD.) - 2016
Využitie modelu v rámci výskumnej činnosti
riešené dizertačné práce
- PAPCUN, Peter:
Modelovanie a optimalizácia robototechnológických výrobných liniek
(školiteľ: doc. Ing. Ján Jadlovský, CSc.) - 2014 publikácie
-
2012
-
PAPCUN, P. - ČOPÍK, M. - ILKOVIČ, J.: Riadenie robota integrovaného v pružnom výrobnom systéme. In: Electroscope – online časopis pro elektrotechniku, ročník 2012, číslo II. ISSN 1802-4564,(ADE)

ILKOVIČ, J. - PAPCUN, P.: Material flow in Flexible Assembly Company. In: SCYR 2012 : 12th Scientific Conference of Young Researchers of Faculty of Electrical Engineering and Informatics Technical University of Košice: proc. - Košice: FEI TU, 2012 S. 177-180. - ISBN 978-80-553-0943-9. (AFD)
PAPCUN, P. - ČOPÍK, M.: Remote control of Mitsubishi industrial robot. In: SCYR 2012 : 12th Scientific Conference of Young Researchers of Faculty of Electrical Engineering and Informatics Technical University of Košice: proc. - Košice: FEI TU, 2012 S. 212-215. - ISBN 978-80-553-0943-9. (AFD)
DUPLINSKÝ, T. – PAPCUN, P. – JADLOVSKÝ, J.: Riadenie robota pomocou platformy Android. In: Electrical Engineering and Informatics 3 : Proceeding of the Faculty of Electrical Engineering and Informatics of the Technical University of Košice. Košice, FEI TU, 2012 - ISBN 978-80-553-0890-6. (AED)
ADAMONDY, P. – PAPCUN, P. – JADLOVSKÝ, J.: Riadenie robota rozpoznávaním ľudských pohybov pomocou zariadenia Kinect. In: Electrical Engineering and Informatics 3 : Proceeding of the Faculty of Electrical Engineering and Informatics of the Technical University of Košice. Košice, FEI TU, 2012 - ISBN 978-80-553-0890-6. (AED)
Profil
Infraštruktúra
Laboratóriá
Členovia
Predmety
Modely
- 32-bitový jednočipový prípravok
- Flexibilný montážny podnik
- Guľôčka na ploche CE151
- Guľôčka na ploche B&P_KYB
- Guľôčka na ploche B&P_KYB_v2
- Helikoptéra CE150
- Hydraulický systém
- Kamerový systém
- Križovatka
- Kyvadlo FPM-210/211
- Magnetická levitácia
- Aerodynamická levitácia
- Mobilný robot Khepera II simulačný prístup
- Mech. modelový sys. dvoj- rozmerného pohybu častíc
- Motor s frekvenčným meničom
- Pásový mobilný robot
- Pružný výrobný systém
- Regálový Zakladač
- Robot Mitsubishi
- Robot SEF
- Výťah
- Robotická ruka OWI
- Univerzálna robotická platforma - ModBot
- Robotický futbalista MiroSot
- Robotický futbalista MiroSot s kamerou v aplikácii bludiska
- Robotizované pracovisko
- Svetelná sústava
- Lab. stavebnica pre pripojenie senzorov do infraštruktúry DCS ALICE - CERN
- Tenzometrické váhy
Výskum
CERN
Galéria
Partneri
