Centrum moderných metód riadenia
a priemyselnej informatiky
Katedra kybernetiky a umelej inteligencie, FEI, Technická Univerzita v Košiciach
Regálový zakladač
 |
Miestnosť:
|
Stručná charakteristika modelu
- model automatického regálového zakladača
- skladá sa zo vstupného a výstupného zásobníka, skladu a trojosého manipulátora
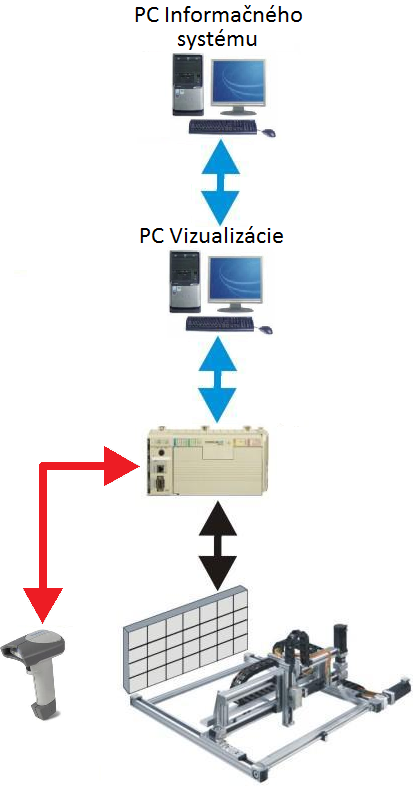
- riadený PLC automatom CompactLogix L23E
- model predstavuje automatický príjem a výdaj liekov na základe receptu
- model je vizualizovaný pomocou programu Intouch od spoločnosti Wonderware
- informačný systém zabezpečuje spracovanie požiadaviek na riadiaci systém výdaju a príjmu liekov
Galéria

|

|
Mechanické prevedenie
- vstupný aj výstupný dopravník je poháňaný jednosmerným motorom
- trojosí manipulátor je poháňaný v osi x aj y krokovým motorom a v osi z pneumaticky
- na hlave manipulátora sú pneumatické kliešte na uchopenie lieku
- sklad je pevne zabudovaný s 24-mi pozíciami
- čítačka čiarových kódov zabezpečuje rozpoznávanie receptov
Zapojenie regálového zakladača:
Využitie modelu v pedagogickom procese
predmety
- Distribuované systémy riadenia (1.ročník Ing. štúdia)
riešené bakalárske práce
- JADLOVSKÝ, Igor: Distribuovaný systém riadenia modelu regálového zakladača na technologickej úrovni
(vedúci ZP: doc. Ing. Ján Jadlovský, CSc., konzultant ZP: Ing. Juraj Chovaňák) - 2010
Profil
Infraštruktúra
Laboratóriá
Členovia
Predmety
Modely
- 32-bitový jednočipový prípravok
- Flexibilný montážny podnik
- Guľôčka na ploche CE151
- Guľôčka na ploche B&P_KYB
- Guľôčka na ploche B&P_KYB_v2
- Helikoptéra CE150
- Hydraulický systém
- Kamerový systém
- Križovatka
- Kyvadlo FPM-210/211
- Magnetická levitácia
- Aerodynamická levitácia
- Mobilný robot Khepera II simulačný prístup
- Mech. modelový sys. dvoj- rozmerného pohybu častíc
- Motor s frekvenčným meničom
- Pásový mobilný robot
- Pružný výrobný systém
- Regálový Zakladač
- Robot Mitsubishi
- Robot SEF
- Výťah
- Robotická ruka OWI
- Univerzálna robotická platforma - ModBot
- Robotický futbalista MiroSot
- Robotický futbalista MiroSot s kamerou v aplikácii bludiska
- Robotizované pracovisko
- Svetelná sústava
- Lab. stavebnica pre pripojenie senzorov do infraštruktúry DCS ALICE - CERN
- Tenzometrické váhy
Výskum
CERN
Galéria
Partneri
