Centrum moderných metód riadenia
a priemyselnej informatiky
Katedra kybernetiky a umelej inteligencie, FEI, Technická Univerzita v Košiciach
Flexibilný montážny podnik
 |
Miestnosť:
|
Stručná charakteristika modelu
- plne automatizovaný model výrobnej linky
- zastrešuje všetkých 5 vrstiev distribuovaného systému riadenia
- pozostáva z piatich postov
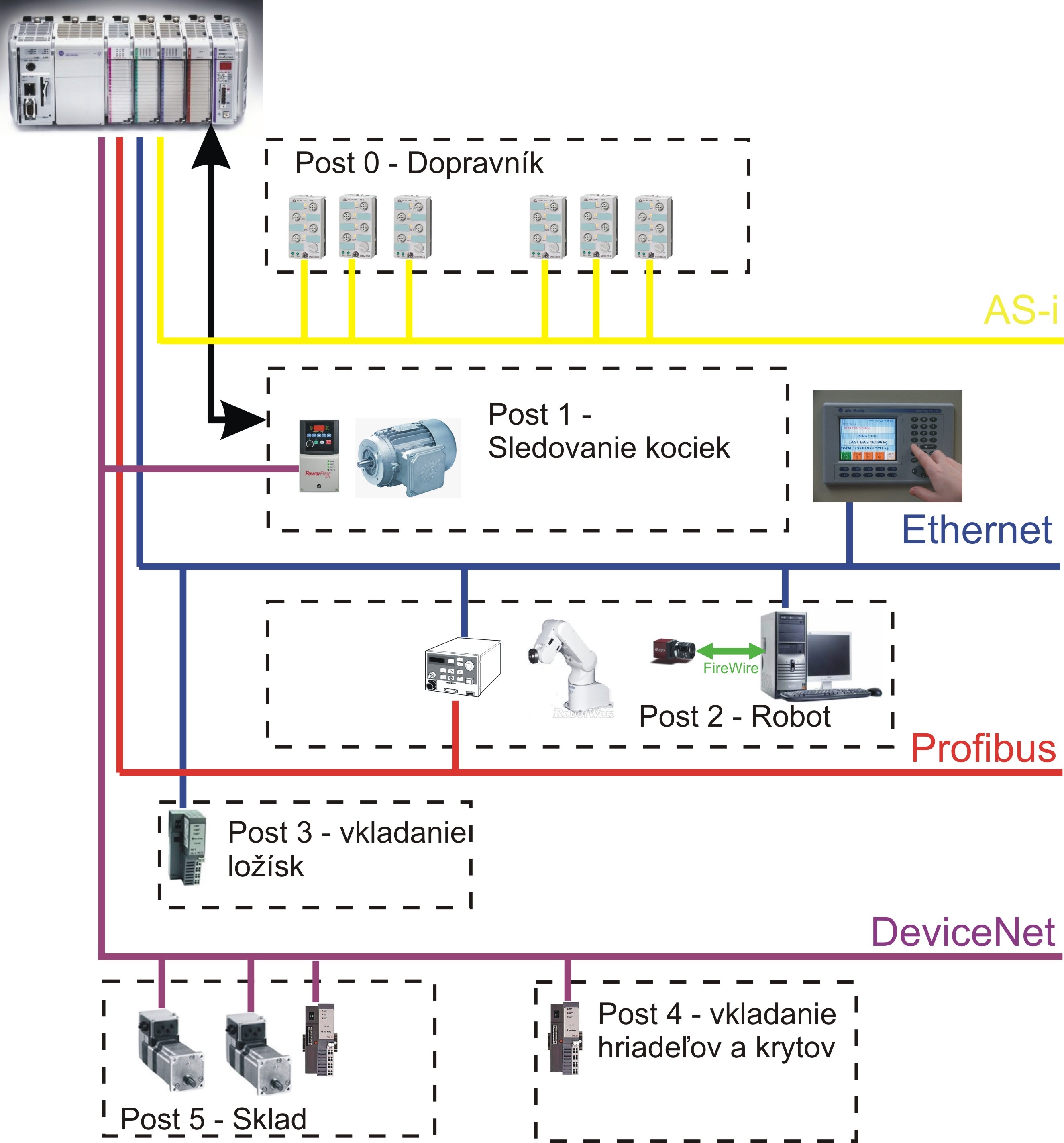
- na linke je využitých 5 sieťových rozhraní: Ethernet, DeviceNet, FireWire, AS-i, ProfiBus
Galéria

|

|
Mechanické prevedenie
- riadiaci systém CompactLogix L32E
- trojosí manipulátor poháňaný trojfázovými krokovými motormi v dvoch osiach a tretia os je pneumatická
- dva veľké a jeden malý dopravníkový pás poháňaný trojfázovými motormi
- v linke je integrovaný priemyselný robot Mitsubishi RV-2SDB
- čiernobiela kamera Guppy F-503-B pripojená k PC pomocou rozhrania FireWire
- optický snímač farby KEYENCE CZ-H35S s vyhodnocovacím zariadením KEYENCE CZ-V21AP
- sklad je pevne zabudovaný s 24-mi pozíciami
- farebný dotykový panel View 600 umožňuje lokálnu vizualizáciu
- linka obsahuje aj viacero pneumatických pohonov, indukčných, optických a odporových snímačov
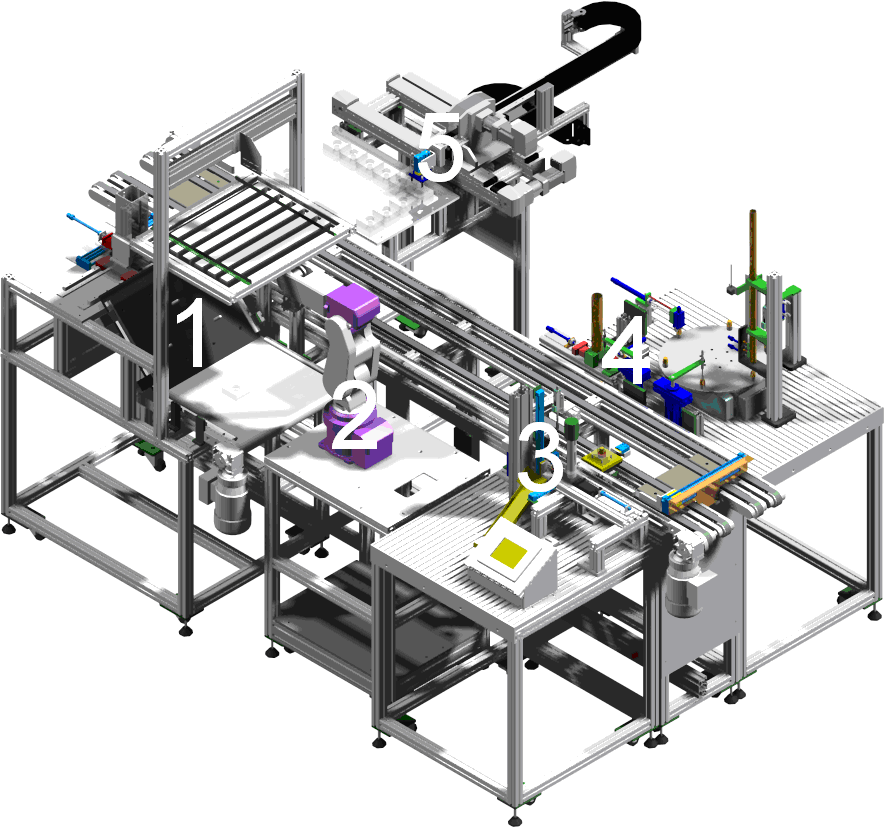
Popis flexibilného montážného podniku (FMP)
- FMP sa skladá z 5 postov zobrazených na obrázku a popísaných nižšie
- úlohou FMP je podľa objednávky vyskladať výrobok zo 4 rôznych dielov (podstavec, ložisko, hriadeĺ, klobúčik)
- kamerový systém pomocou aplikácie rozpoznávania obrazov určuje polohu podstavca na malom páse
- informačný systém zbiera a vyhodnocuje objednávky, určuje plán výroby, umožňuje sledovanie skladov a analýzu FMP
- operátor má možnosť kontrolovať a ovládať výrobu pomocou lokálnej a vzdialenej vizualizácie
- Dopravník: presúva palety medzi jednotlivými postami
- post 1: na post je náhodne vysunutá podstava ktorej poloha je detekovaná pomocou kamery a súradnice sú poslané do PLC
- post 2: robot Mitsubishi vyčíta polohu podstavca z PLC, vyzdvihne ho z pása a položí na paletu
- post 3: otočný manipulátor vloží ložisko so zásobníka do podstavca
- post 4: otočné manipulátory vkladajú do ložiska hriadeľ a následne klobúčik, tieto sú dopravované zo zásobníkov pomocou otočného stola
- post 5: trojosí manipulátor uloží hotový výrobok do skladu
- Výskumné laboratórium nelineárnych podaktuovaných systémov TUKE FEI-2015-33 (Research laboratory for nonlinear underactuated systems)(1/2017 - 12/2017)
- Univerzitný vedecký park Technicom pre inovačné aplikácie s podporou znalostných technológií - II.fáz, kód ITMS:313011D232, spolufinancovaný zo zdrojov Európskeho fondu regionálneho rozvoja, (2015 - 2017), Centrum pre nedeštruktívnu diagnostiku technologických procesov so štandartným softvérovým vybavením pre riadenie a komunikáciu (aktivita 3.1, PP7)/
- Univerzitný vedecký park Technicom pre inovačné aplikácie s podporou znalostných technológií, kód ITMS:26220220182, spolufinancovaný zo zdrojov Európskeho fondu regionálneho rozvoja, (2013 - 2015), Centrum pre nedeštruktívnu diagnostiku technologických procesov so štandartným softvérovým vybavením pre riadenie a komunikáciu (aktivita 3.1)
predmety
- Distribuované systémy riadenia (1.ročník Ing. štúdia)
riešené diplomové práce
- PAPCUN, Peter: Riadenie robota integrovaného v pružnej výrobnej linke
(vedúci ZP: doc. Ing.Ján Jadlovský CSc., konzultant ZP: Ing. Matej Čopík) - 2011 - KAČMÁR, Matej: Aplikácia systému rozpoznávania dynamických obrazov pre výrobné linky.
(vedúci ZP: doc. Ing.Ján Jadlovský CSc., konzultant ZP: Ing. Matej Čopík) - 2011 - KRAJČI, Tomáš: Návrh a realizácia informačného systému pre flexibilný montážny podnik.
(vedúci ZP: doc. Ing.Ján Jadlovský CSc., konzultant ZP: Ing. Matej Čopík) - 2012 - LINKESCH, Pavel: Návrh a realizácia manažérskeho systému pre flexibilný montážny podnik.
(vedúci ZP: doc. Ing.Ján Jadlovský CSc., konzultant ZP: Ing. Matej Čopík) - 2012 - JADLOVSKÝ, Igor: Návrh a realizácia riadenia flexibilného montážneho podniku PLC automatom.
(vedúci ZP: prof. Ing. Ján Sarnovský CSc., konzultant ZP: Ing. Matej Čopík) - 2012 - JAŠKO, Ľuboš: Aplikácia Stateflow diagramov v modelovaní výrobnej linky v prostredí Matlab
(vedúci ZP: doc. Ing. Ján Jadlovský, CSc.; konzultant: Ing. Ján Čabala) - 2015 - VALIK, Lukáš: Návrh a realizácia riadenia výrobnej linky pomocou PLC
(vedúci: doc. Ing.Ján Jadlovský, CSc.; konzultant: Ing.Peter Papcun) - 2015 - FEČO, Peter: Systémy hromadnej obsluhy a ich využitie pri optimalizácii výrobných liniek
(vedúci ZP: doc. Ing. Ján Jadlovský, CSc.; konzultant: Ing. Ján Čabala) - 2017 riešené bakalárske práce
- NOVOTNÁ, Veronika: Realizácia aplikácie pre rozpoznávanie objektov pomocou kamery a ich zaradenie do skupín podľa definovaných vzorov
(vedúci: doc. Ing.Ján Jadlovský, CSc.; konzultant: Ing.Peter Papcun) - 2015 - HANC, Erik: Realizácia informačného systému flexibilného montážneho podniku na báze RDBS Oracle
(vedúci ZP: doc. Ing. Ján Jadlovský, CSc.) - 2016 - ROHAĽ, Samuel: Využitie evolučných algoritmov v úlohách viackriteriálnej optimalizácie
(vedúci ZP: doc. Ing. Ján Jadlovský, CSc.; konzultant: Ing. Ján Čabala) - 2017 riešené dizertačné práce
- ILKOVIČ, Ján:
Modelovanie a diagnostika manipulačných a robotizovaných systémov
(školiteľ: doc. Ing. Ján Jadlovský, CSc.) - 2012 - ČOPÍK, Matej:
Metodika návrhu a realizácie výrobných liniek s ohľadom na optimalizáciu času výroby
(školiteľ: doc. Ing. Ján Jadlovský, CSc.) - 2014 - PAPCUN, Peter:
Modelovanie a optimalizácia robototechnológických výrobných liniek
(školiteľ: doc. Ing. Ján Jadlovský, CSc.) - 2015 - ČABALA, Ján:
Metodika procesu multikriteriálnej optimalizácie výrobných liniek
(školiteľ: doc. Ing. Ján Jadlovský, CSc.) - 2018 prezentácia výskumnej činnosti
-
JADLOVSKÝ, J. - JADLOVSKÁ, A. - SARNOVSKÝ, J. - ZOLOTOVÁ, I. - JADLOVSKÁ, S. - PAPCUN, P. - ČERKALA, J. - KOPČÍK, M. - ČABALA, J. - ORAVEC, M. - ČOPÍK, M.: Center for Nondestructive Diagnostics of Technological Processes, In: University Science Park TECHNICOM. - Košice : TU, 2014 S. 1-1. - ISBN 979-80-8086-240-4

-
JADLOVSKÝ, J. et al. : Research Activities of the Center of Modern Control Techniques and Industrial Informatics In: In: SAMI 2016. - Danvers : IEEE, 2016 P. 279-285. - ISBN 978-1-4673-8739-2
-
Centrum Moderných Metód Riadenia a Priemyselnej Informatiky na KKUI FEI TU v Košiciach (prezentácia výsledkov medzinárodného projektu základného výskumu ALICE CERN – ALICE KE FEI TU a projektu aplikovaného výskumu TECHNICOM PP7/3.1)
publikácie
-
ČABALA, J. – JADLOVSKÝ, J.: Choosing the Optimal Production Strategy by Multi - Objectivve Optimization Methods, In: Acta Polytechnica Hungarica, Journal of Applied Sciences, Vol.17, No.5, pp. 7-26, 2020, http://acta.uni-obuda.hu/Issue102.htm
-
JADLOVSKÝ, J. - JADLOVSKÁ, A. - JADLOVSKÁ, S. - ČERKALA, J. - KOPČÍK, M. - ČABALA, J. - ORAVEC, M. - VARGA, M. - VOŠČEK, D.: Modelovanie, diagnostika a optimalizácia výrobných liniek In: Strojárstvo/Strojírenství: Engineering Magazine, www.engineering.sk/strojarstvo-extra , Roč. XXI, č. 11, 2017, s. 104-106., ISSN 1335-2938, dostupné online:
http://www.engineering.sk/clanky2/stroje-a-technologie/3806-modelovanie-diagnostika-a-optimalizacia-vyrobnych-liniek -
JADLOVSKÁ, A. – JADLOVSKÝ, J. – JADLOVSKÁ, S. – ČERKALA, J. – KOPČÍK, M. – ČABALA, J. – ORAVEC, M. – VARGA, M. – VOŠČEK, D. – TKÁČIK, M. – BŘEZINA, A.: Návrh metodiky pre modelovanie, riadenie, simuláciu a nedeštruktívnu diagnostiku mobilných robotov In: Strojárstvo/Strojírenství: Engineering Magazine, www.engineering.sk/strojarstvo-extra , Roč. XXI, č. 11, 2017, s. 1-9, 2017, ISSN 1335-2938 dostupné online:
http://www.engineering.sk/clanky2/automatizacia-robotizacia/3805-navrh-metodiky-pre-modelovanie-riadenie-simulaciu-a-nedestruktivnu-diagnostiku-mobilnych-robotov -
-
ILKOVIČ, J. - ČOPÍK, M. - KAROĽ, T: The assembly line model at Department of Cybernetics and Artificial Intelligence. In: SCYR 2011 : 11th Scientific Conference of Young Researchers of Faculty of Electrical Engineering and Informatics Technical University of Košice : proc. - Košice : FEI TU, 2011 S. 373-376. - ISBN 978-80-553-0644-5.
-
PAPCUN, P. - ČOPÍK, M. - ILKOVIČ, J.: Control of robot integrated in flexible production line. In: Electroscope – online časopis pro elektrotechniku, 2012, number II. ISSN 1802-4564,(ADE)
-
ILKOVIČ, J. - PAPCUN, P.: Material flow in Flexible Assembly Company. In: SCYR 2012 : 12th Scientific Conference of Young Researchers of Faculty of Electrical Engineering and Informatics Technical University of Košice: proc. - Košice: FEI TU, 2012 S. 177-180. - ISBN 978-80-553-0943-9. (AFD)
-
KRAJČI, T. - ČOPÍK, M - JADLOVSKÝ, J.: Návrh a realizácia informačného systém pre flexibilný montážny podnik In: Electrical Engineering and Informatics 3 : proceeding of the Faculty of Electrical Engineering and Informatics of the Technical University of Košice. - Košice : FEI TU, 2012 S. 141-144. - ISBN 978-80-553-0890-6
-
LINKESCH. P. - ČOPÍK, M - JADLOVSKÝ, J.: Návrh a realizácia manažérskeho systému pre flexibilný montážny podnik In: Electrical Engineering and Informatics 3 : proceeding of the Faculty of Electrical Engineering and Informatics of the Technical University of Košice. - Košice : FEI TU, 2012 S. 149-153. - ISBN 978-80-553-0890-6
-
JADLOVSKÝ, I. - ČOPÍK, M - SARNOVSKÝ, J.: Návrh a realizácia riadenia flexibilného montážneho podniku PLC automatom / Igor Jadlovský, Matej Čopík, Ján Sarnovský - 2012. In: Electrical Engineering and Informatics 3 : proceeding of the Faculty of Electrical Engineering and Informatics of the Technical University of Košice. - Košice : FEI TU, 2012 S. 107-110. - ISBN 978-80-553-0890-6
-
JADLOVSKÝ, J. - JADLOVSKÁ, A. - SARNOVSKÝ, J. - ZOLOTOVÁ, I. - JADLOVSKÁ, S. - PAPCUN, P. - ČERKALA, J. - KOPČÍK, M. - ČABALA, J. - ORAVEC, M. - ČOPÍK, M.: Center for Nondestructive Diagnostics of Technological Processes, In: University Science Park TECHNICOM. - Košice : TU, 2014 S. 1-1. - ISBN 979-80-8086-240-4
-
ČABALA, J. – JADLOVSKÝ, J. : Application of Stateflow Diagrams in Production Line Modeling In: SAMI 2016. - Danvers : IEEE, 2016 P. 125-130. - ISBN 978-1-4673-8739-2
-
ČABALA, J. : Methodology of Multi-objective Optimization of Assembly Lines. In: SCYR 2016. - Košice : TU, 2016 S. 172-173. - ISBN 978-80-553-2566-8
-
JADLOVSKÝ, J. et al. : Research Activities of the Center of Modern Control Techniques and Industrial Informatics In: In: SAMI 2016. - Danvers : IEEE, 2016 P. 279-285. - ISBN 978-1-4673-8739-2
-
ČABALA, J. – JADLOVSKÝ, J. - HANC, E. : Information system of automated assembly line on RDBS Oracle base In: Electrical Engineering and Informatics 7 : proceedings of the Faculty of Electrical Engineering and Informatics of the Technical University of Košice. - Košice : FEI TU, 2016, S. 259-264. - ISBN 978-80-553-2599-6
-
ČABALA, J. – JADLOVSKÝ, J. : Solving optimal assembly line configuration task by multi-objective decision making methods In: Acta Electrotechnica et Informatica. Vol. 17, num. 2 (2017), P. 53-60. - ISSN 1335-8243
-
ČABALA, J. : Multi- objective Optimization and Decision Making Problems of Assembly Lines. In: SCYR 2017. - Košice : TU, 2017 S. 166-167. - ISBN 978-80-553-3162-1
Popis jednotlivých postov
Zapojenie FMP:
Projekty
Využitie modelu v pedagogickom procese
Využitie modelu v rámci výskumnej činnosti
Profil
Infraštruktúra
Laboratóriá
Členovia
Predmety
Modely
- 32-bitový jednočipový prípravok
- Flexibilný montážny podnik
- Guľôčka na ploche CE151
- Guľôčka na ploche B&P_KYB
- Guľôčka na ploche B&P_KYB_v2
- Helikoptéra CE150
- Hydraulický systém
- Kamerový systém
- Križovatka
- Kyvadlo FPM-210/211
- Magnetická levitácia
- Aerodynamická levitácia
- Mobilný robot Khepera II simulačný prístup
- Mech. modelový sys. dvoj- rozmerného pohybu častíc
- Motor s frekvenčným meničom
- Pásový mobilný robot
- Pružný výrobný systém
- Regálový Zakladač
- Robot Mitsubishi
- Robot SEF
- Výťah
- Robotická ruka OWI
- Univerzálna robotická platforma - ModBot
- Robotický futbalista MiroSot
- Robotický futbalista MiroSot s kamerou v aplikácii bludiska
- Robotizované pracovisko
- Svetelná sústava
- Lab. stavebnica pre pripojenie senzorov do infraštruktúry DCS ALICE - CERN
- Tenzometrické váhy
Výskum
CERN
Galéria
Partneri
