Centrum moderných metód riadenia
a priemyselnej informatiky
Katedra kybernetiky a umelej inteligencie, FEI, Technická Univerzita v Košiciach
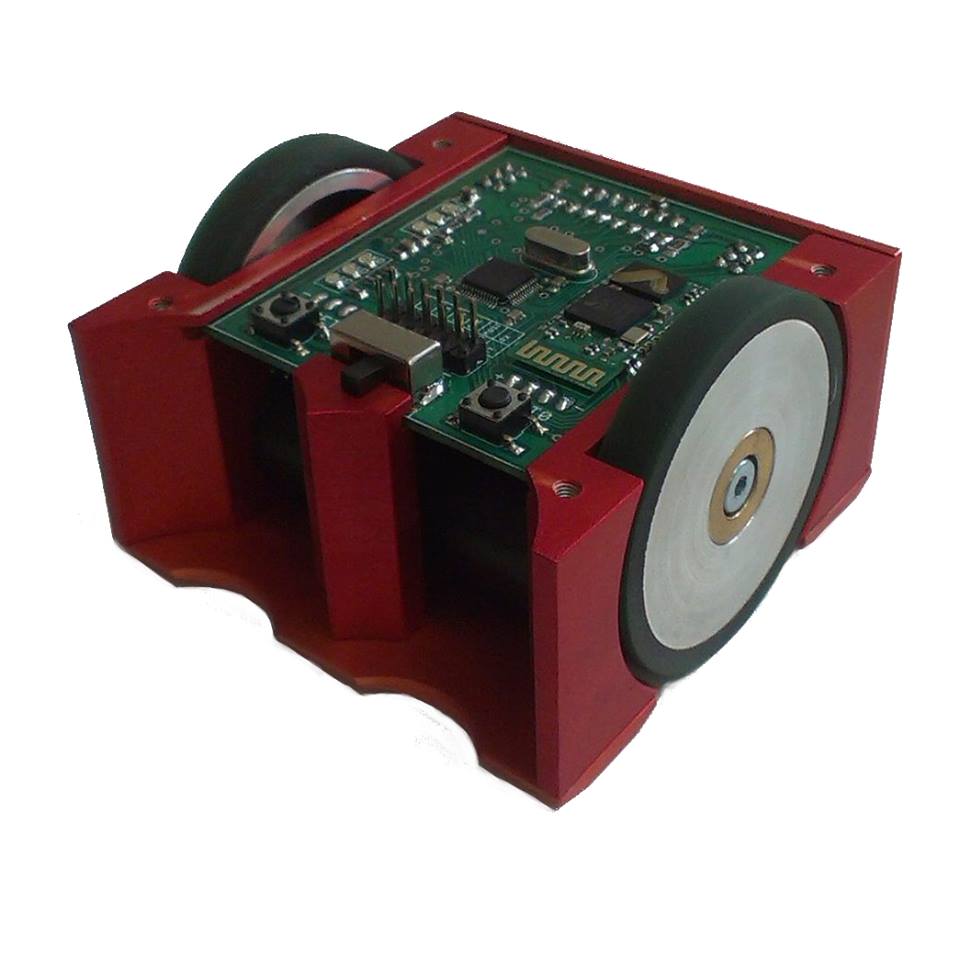
Robotický futbalista MiroSot
 |
Miestnosť:
|
Stručná charakteristika modelu
- robotický futbalista kategórie MiroSot riadený 32-bitovým jednočipovým mikropočítačom
- pripojenie k nadradenému počítaču pomocou Bluetooth modulu
- parametre mobilného robota:
- maximálna teoretická rýchlosť 2,5 m/s
- maximálne teoretické zrýchlenie 5 m/s^2
- rozmery 7,5 cm x 7,5 cm x 5 cm
- hmotnosť 450 g
- presnosť snímania pohybu 724 impulzov na milimeter
- mobilný robot disponuje:
- 32-bitovým jednočipovým mikropočítačom STM32F103
- Bluetooth komunikačným modulom HC-05
- celokovovou konštrukciou z duralu
- Li-Pol 2S baterkou s kapacitou 850 mAh (výdrž približne 20 min)
- konektorom pre pripojenie externých senzorov
- DC mikromotormi 2224U006SR s integrovanými inkrementálnymi snímačmi IEH2-4096
- LED diódami a tlačidlom
Galéria

|
Bloková schéma riadiaceho systému mobilného robota

Využitie modelu v pedagogickom procese
predmety
- Jednočípové mikropočítače (2.ročník Bc. štúdia)
riešené diplomové práce
-
BŘEZINA, Adam : Embedded systémy a ich implementácia v rámci mobilných robotických systémov
(vedúci ZP: doc. Ing. Ján Jadlovský, CSc.) - 2019 -
TKÁČIK, Milan: Embedded systémy v rámci distribuovaných riadiacich a monitorovacích systémov
(vedúci ZP: doc. Ing. Ján Jadlovský, CSc.) - 2019 - ŠTEFANIŠIN, Jakub" Riadenie pohybu mobilnych robotov pre robotický futbal
(vedúci ZP: doc. Ing. Ján Jadlovský, CSc., konzultant ZP: Ing. Dominik Vošček) - 2018 prezentácia ku obhajobe video ku obhajobe - FOLTIN, Gustáv: Systém riadenia mobilného robota v bludisku<
(vedúci ZP: doc. Ing. Ján Jadlovský, CSc., konzultant ZP: Ing. Jaroslav Socháň) - 2018 - KLEIN, Tomáš" Implementácia riadiacich algoritmov pre mobilné roboty s diferenciálnym kolesovým podvozkom
(vedúci ZP: doc. Ing. Anna Jadlovská, PhD., konzultant ZP: Ing. Jakub Čerkala) - 2017 prezentácia ku obhajobe video ku obhajobe - VARGA, Michal: Spracovanie obrazu za účelom lokalizácie mobilných robotov
(vedúci ZP: doc. Ing. Ján Jadlovský, CSc., konzultant ZP: Ing. Michal Kopčík) - 2015 - TOMČÁK, M.: Inteligentné modelovanie a riadenie mobilného robota
(vedúci ZP: doc. Ing. Anna Jadlovská, PhD., konzultant ZP: Ing. Jakub Čerkala) - 2015 -
FIC, Ján: Riadenie mobilného robota Khepera II s využitím metód umelej inteligencie:
(vedúci a konzultant DP: doc. Ing. Anna Jadlovská, PhD.) - 2009 riešené bakalárske práce
- ŠTEFANIŠIN, Jakub: Návrh a realizácia stratégie mobilného robotického futbalu kategórie MiroSot v rámci systému ROS
(vedúci ZP: doc. Ing. Ján Jadlovský, CSc., konzultant ZP: Ing. Michal Varga) - 2016 - PAVKOVČEK, Daniel: Zber a vyhodnocovanie dát po zbernici I2C použitím jednočípových mikropočítačov
(vedúci ZP: doc. Ing. Ján Jadlovský, CSc., konzultant ZP: Ing. Michal Kopčík) - 2016 - FOLTIN, Gustáv: Riadenie pohybu mobilného robota v bludisku na základe obrazu z kamery<
(vedúci ZP: doc. Ing. Ján Jadlovský, CSc., konzultant ZP: Ing. Michal Kopčík) - 2016 - MODLA, Dalibor: Návrh a realizácia funkcií pre riadenie pohybu mobilného robota v bludisku
(vedúci ZP: doc. Ing. Ján Jadlovský, CSc., konzultant ZP: Ing. Michal Kopčík) - 2015 - KONTUĽ, Juraj: Návrh a realizácia riadiaceho systému mobilných robotov na báze systému ROS pre pohyb robota v bludisku
(vedúci ZP: doc. Ing. Ján Jadlovský, CSc., konzultant ZP: Ing. Jaroslav Socháň) - 2017 prezentácia ku obhajobe - DZIAK, Patrik: Embedded systémy a ich implementácia pri riadení mobilných robotov v súlade s konceptom Industry 4.0.
(vedúci ZP: doc. Ing. Ján Jadlovský, CSc., konzultant ZP: Ing. Jaroslav Socháň) - 2017 riešené dizertačné práce
- ČERKALA, Jakub: Modelovanie a riadenie mobilných robotov s využitím neurónových modelov, FEI TU 2017,
(školiteľ: doc. Ing. Jadlovská, A.PhD.) - KOPČÍK, Michal: Vytvorenie metodiky pre diagnostiku senzorických systémov v rámci distribuovaného systému riadenia so zameraním na mobilnú robotiku, FEI TU, 2018,
(školiteľ: doc. Ing. Jadlovský, J., CSc.)
Využitie modelu v rámci výskumnej činnosti
2017
ČERKALA, J. - JADLOVSKÁ, A.: Application of neural models as controllers in mobile robot velocity control loop, In: Journal of Electrical Engineering. Roč. 68, č. 1 (2017), s. 39-46. - ISSN 1335-3632 (ADN),
2016
JADLOVSKÝ, J. - KOPČÍK, M.: Distributed Control System for Mobile Robots with Differential Drive. In:2016 Cybernetics & Informatics (K&I). - Danvers : IEEE, 2016 P. 1-5. - ISBN 978-1-5090-1832-1 (AFD)
JADLOVSKÝ, J. et al. : Research Activities of the Center of Modern Control Techniques and Industrial Informatics In: In: SAMI 2016. - Danvers : IEEE, 2016 P. 279-285. - ISBN 978-1-4673-8739-2 (AFD)
JADLOVSKÝ, J. - JADLOVSKÁ, A. - JADLOVSKÁ, S. - ČERKALA, J. - KOPČÍK, M. - ČABALA, J. - ORAVEC, M. - VARGA, M. - VOŠČEK, D.: Research Activities of the Center of Modern Control Techniques and Industrial Informatics In: SAMI 2016. - Danvers : IEEE, 2016 S. 279-285. - ISBN 978-1-4673-8739-2 , (AFD)
ČERKALA, J.: Methodology for the Modelling of Mobile Robot with Differential Chassis / Jakub Čerkala - 2016.In: SCYR 2016. - Košice : TU, 2016 S. 170-171. - ISBN 978-80-553-2566-8 Spôsob prístupu: http://scyr.fei.tuke.sk/scyrfiles/history/SCYR_2016_proceedings.pdf., (AFD)
2015
JADLOVSKÝ, J. - VARGA, M. - KOPČÍK, M.: Image Processing for Localization of Mobile Robots. In: Electrical Engineering and Informatics 6 : proceedings of the Faculty of Electrical Engineering and Informatics of the Technical University of Košice. - Košice : FEI TU, 2015 S. 574-577. - ISBN 978-80-553-2178-3. (AED)
KOPCIK, M.: Diagnostics of Sensors and Actuators Within Distributed Control System. In: SCYR 2015: 15th Scientific Conference of Young Researchers: proceedings from conference: May 20th, 2014, Herľany, Slovakia. - Košice : TU, 2015 S. 214-215. - ISBN 978-80-553-2130-1. (AFD)
ČERKALA, J. - JADLOVSKÁ, A.: Nonholonomic Mobile Robot with Differential Chassis Mathematical Modelling and Implementation in Simulink with Friction in Dynamics In: Acta Electrotechnica et Informatica. Roč. 15, č. 3 (2015), s. 3-8. - ISSN 1335-8243 , (ADF)
ČERKALA, J. - JADLOVSKÁ, A.: Dynamics with Friction in Mobile Robot Simulink Model In: Technical Computing Bratislava 2014 Proceedings. - Saarbrücken : Lap Lambert Academic Publishing, 2015 P. 65-81. - ISBN 978-3-659-40792-5 , (AEC)
ČERKALA, J. - JADLOVSKÁ, A. - SZÜRÖS, Š. 3D visualization of mechatronic systems using OpenGL, In: Electrical Engineering and Informatics 6 : proceedings of the Faculty of Electrical Engineering and Informatics of the Technical University of Košice. - Košice : FEI TU, 2015 S. 351-356. - ISBN 978-80-553-2178-3 (AED)
ČERKALA, Jakub - JADLOVSKÁ, Anna – KLEIN, T.: Modeling and Control of Mobile Robot with Differential Chassis, In: Electrical Engineering and Informatics 6 : proceedings of the Faculty of Electrical Engineering and Informatics of the Technical University of Košice. - Košice : TU, 2015 S. 656-661. - ISBN 978-80.553-2178-3 , (AED)
JADLOVSKÁ, A. - ČERKALA, J. - TOMČÁK, M. Neural Model in Mobile Robot Trajectory Following Task, In: Electrical Engineering and Informatics 6 : proceedings of the Faculty of Electrical Engineering and Informatics of the Technical University of Košice. - Košice : FEI TU, 2015 S. 739-744. - ISBN 978-80-553-2178-3 (AED)
2014
ČERKALA, J. Modeling and control of robotic systems, In: SCYR 2014 : 14th Scientific Conference of Young Researchers : proceedings from conference : May 20th, 2014, Herľany, Slovakia. - Košice : TU, 2014 S. 217-218. - ISBN 978-80-553-1714-4, (AFD)
JADLOVSKÝ, J. - JADLOVSKÁ, A. - SARNOVSKÝ, J. - ZOLOTOVÁ, I. - JADLOVSKÁ, S. - PAPCUN, P. - ČERKALA, J. - KOPČÍK, M.- ČABALA, J. - ORAVEC, M. - ČOPÍK, M.: Center for Nondestructive Diagnostics of Technological Processes, In: University Science Park TECHNICOM. - Košice : TU, 2014 S. 1-1. - ISBN 979-80-8086-240-4 (AFL)
ČERKALA, J. - JADLOVSKÁ, A.: Mobile Robot Dynamic with Friction in Simulink, In: Technical Computing Bratislava 2014 : 22nd Annual Conference Proceedings : Bratislava, 4.11.2014. - Prague : Institute of Chemical Technololgy, 2014 P. 1-10. - ISBN 978-80-7080-898-6 Spôsob prístupu: http://www.humusoft.cz/akce/tcb2014/., (AFD)
Publikácie
Profil
Infraštruktúra
Laboratóriá
Členovia
Predmety
Modely
- 32-bitový jednočipový prípravok
- Flexibilný montážny podnik
- Guľôčka na ploche CE151
- Guľôčka na ploche B&P_KYB
- Guľôčka na ploche B&P_KYB_v2
- Helikoptéra CE150
- Hydraulický systém
- Kamerový systém
- Križovatka
- Kyvadlo FPM-210/211
- Magnetická levitácia
- Aerodynamická levitácia
- Mobilný robot Khepera II simulačný prístup
- Mech. modelový sys. dvoj- rozmerného pohybu častíc
- Motor s frekvenčným meničom
- Pásový mobilný robot
- Pružný výrobný systém
- Regálový Zakladač
- Robot Mitsubishi
- Robot SEF
- Výťah
- Robotická ruka OWI
- Univerzálna robotická platforma - ModBot
- Robotický futbalista MiroSot
- Robotický futbalista MiroSot s kamerou v aplikácii bludiska
- Robotizované pracovisko
- Svetelná sústava
- Lab. stavebnica pre pripojenie senzorov do infraštruktúry DCS ALICE - CERN
- Tenzometrické váhy
Výskum
CERN
Galéria
Partneri
