Center of Modern Control Techniques
and Industrial Informatics
Department of cybernetics and artificial intelligence (DCAI), FEEI, Technical University of Košice
Flexible Assembly Company
 |
Room:
|
Brief description of the model
- fully automated model of a production line
- covers all five layers of the distributed control system
- consists of five posts
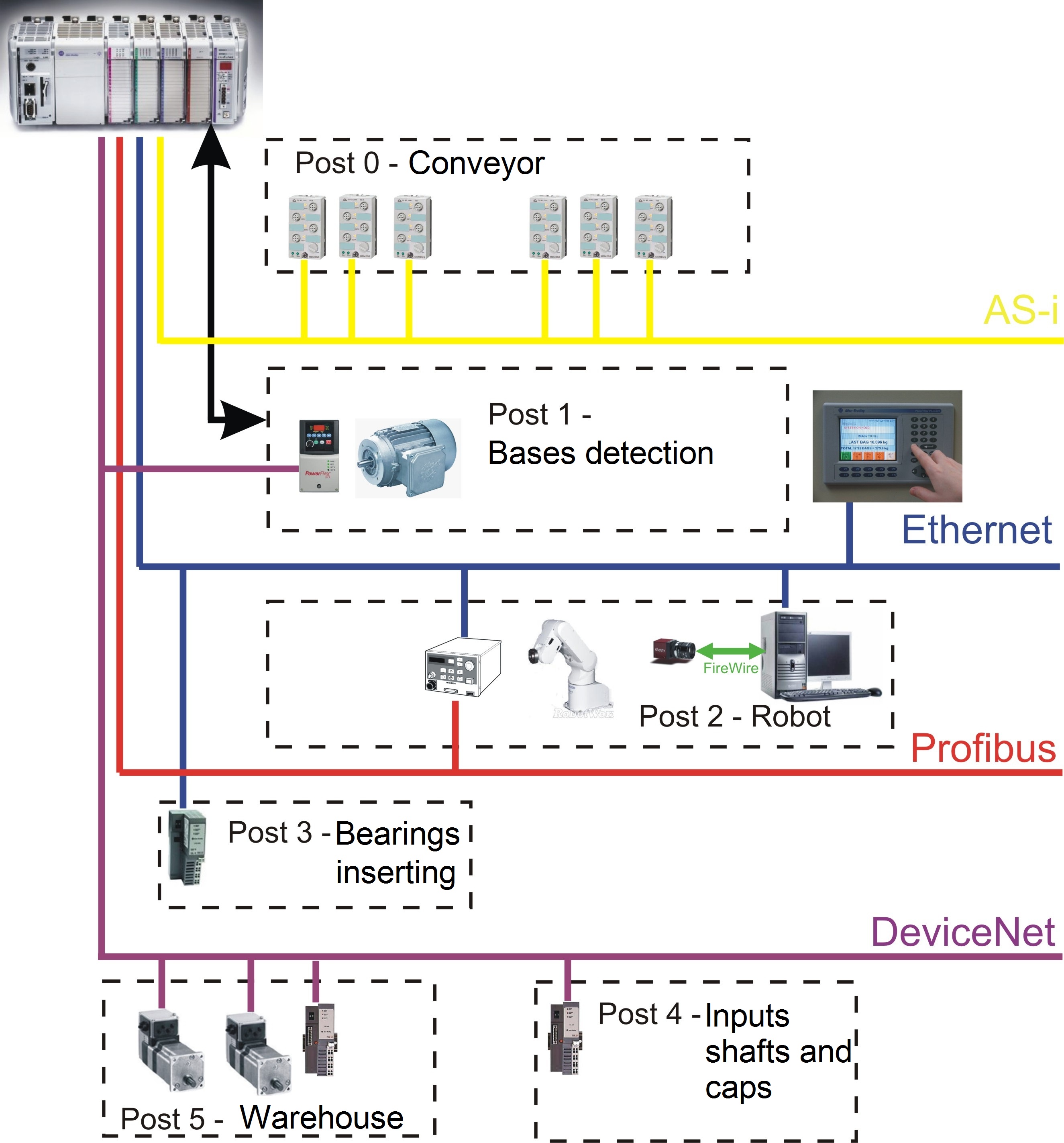
- the production line model uses five types of technological interfaces: Ethernet, DeviceNet, FireWire, AS-i, ProfiBus
Gallery

|

|
Mechanical design
- L32E CompactLogix control system
- three-axis manipulator driven by three-phase stepper motors in two axes; the third axis is pneumatic
- one small and two large conveyor belts driven by three-phase motors
- the line is integrated with an industrial robot Mitsubishi RV-2SDB
- gray scale camera Guppy F-503-B, connected to a PC through FireWire
- KEYENCE CZ-H35S optical color sensor with KEYENCE CZ-V21AP evaluating instrument
- warehouse is permanently installed with 24 positions
- View 600 color touch panel allows local visualization
- the line includes a number of pneumatic actuators, inductive, resistive and optical sensors
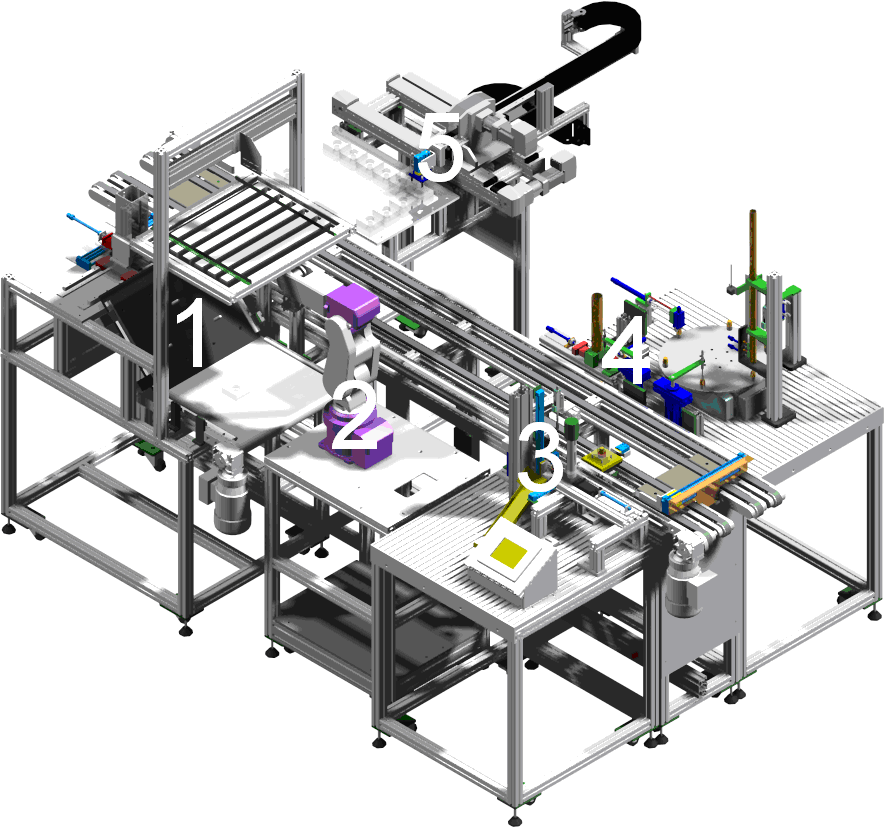
Description of the Flexible Assembly Company (FAC):
- FAC consists of 5 positions shown in the figure and described below
- the FAC is required to assemble a product out of 4 different parts (base, bearing, shaft, cap) according to a specific order
- camera system uses an image recognition application to determine the position of the base on the small conveyor belt
- the information system collects and evaluates orders, determines the production plan, allows stack tracking and FAC analysis
- the operator is able to control and manage production through local and remote visualization
- Conveyor: moves pallets between posts
- post 1: the base, which is randomly ejected onto the post, has its position detected by the camera and the coordinates are sent to the PLC
- post 2: Mitsubishi robot reads the position of the base from the PLC, picks it up from the belt and puts it on the pallette
- post 3: rotary manipulator inserts the bearing from the tray into the base
- post 4: rotary manipulators insert the rotating shaft and next the cap inside the bearing, the latter are transported from the stack by turntable
- post 5: three-axis manipulator stores the finished product in the warehouse
courses
- Distributed Control Systems (1st grade master degree)
diploma theses
- PAPCUN, Peter: Control of robot integrated in flexible production line.
(supervisor: doc. Ing.Ján Jadlovský CSc., consultant: Ing. Matej Čopík) - 2011 - KAČMÁR, Matej: Application of dynamic image recognition system for production lines.
(supervisor: doc. Ing.Ján Jadlovský CSc., consultant: Ing. Matej Čopík) - 2011 - KRAJČI, Tomáš: Design and implementation of information system for flexible assembly business.
(supervisor: doc. Ing.Ján Jadlovský CSc., consultant: Ing. Matej Čopík) - 2012 - LINKESCH, Pavel: Design and implementation of management system for flexible manufacturing system.
(supervisor: doc. Ing.Ján Jadlovský CSc., consultant: Ing. Matej Čopík) - 2012 - JADLOVSKÝ, Igor: Design and implementation control of Flexible manufacturing system using PLC.
(supervisor: prof. Ing. Ján Sarnovský, CSc., consultant: Ing. Matej Čopík) - 2012 dissertation theses
- ILKOVIČ, Ján:
Modeling and diagnostic of manipulating and robotized systems
(supervisor: doc. Ing. Ján Jadlovský, CSc.) - 2012 (in preparation) - ČOPÍK, Matej:
Methodology for the design and implementation of production lines with to optimize production time
(supervisor: doc. Ing. Ján Jadlovský, CSc.) - 2013 (in preparation) - PAPCUN, Peter:
Modeling and optimization of robotic and technological production lines
(supervisor: doc. Ing. Ján Jadlovský, CSc.) - 2014 (in preparation) publications
-
2011
-
ILKOVIČ, J. - ČOPÍK, M. - KAROĽ, T: The assembly line model at Department of Cybernetics and Artificial Intelligence. In: SCYR 2011 : 11th Scientific Conference of Young Researchers of Faculty of Electrical Engineering and Informatics Technical University of Košice : proc. - Košice : FEI TU, 2011 S. 373-376. - ISBN 978-80-553-0644-5. (AFD)

- 2012
-
PAPCUN, P. - ČOPÍK, M. - ILKOVIČ, J.: Control of robot integrated in flexible production line. In: Electroscope – online časopis pro elektrotechniku, 2012, number II. ISSN 1802-4564,(ADE)
-
ILKOVIČ, J. - PAPCUN, P.: Material flow in Flexible Assembly Company. In: SCYR 2012 : 12th Scientific Conference of Young Researchers of Faculty of Electrical Engineering and Informatics Technical University of Košice: proc. - Košice: FEI TU, 2012 S. 177-180. - ISBN 978-80-553-0943-9. (AFD)
-
KRAJČI, T. - ČOPÍK, M - JADLOVSKÝ, J.: Návrh a realizácia informačného systém pre flexibilný montážny podnik In: Electrical Engineering and Informatics 3 : proceeding of the Faculty of Electrical Engineering and Informatics of the Technical University of Košice. - Košice : FEI TU, 2012 S. 141-144. - ISBN 978-80-553-0890-6
-
LINKESCH. P. - ČOPÍK, M - JADLOVSKÝ, J.: Návrh a realizácia manažérskeho systému pre flexibilný montážny podnik In: Electrical Engineering and Informatics 3 : proceeding of the Faculty of Electrical Engineering and Informatics of the Technical University of Košice. - Košice : FEI TU, 2012 S. 149-153. - ISBN 978-80-553-0890-6
-
JADLOVSKÝ, I. - ČOPÍK, M - SARNOVSKÝ, J.: Návrh a realizácia riadenia flexibilného montážneho podniku PLC automatom / Igor Jadlovský, Matej Čopík, Ján Sarnovský - 2012. In: Electrical Engineering and Informatics 3 : proceeding of the Faculty of Electrical Engineering and Informatics of the Technical University of Košice. - Košice : FEI TU, 2012 S. 107-110. - ISBN 978-80-553-0890-6
Description of posts
Interfaces connections of FAC:
Using the model in pedagogy
Using model in the research
Profile
Infrastructure
Laboratories
Members
Courses
Models
- 32-bit single-chip product
- Flexible Assembly Company
- Ball & Plate CE151
- Ball & Plate B&P_KYB
- Helicopter
- Hydraulic system
- Video camera system
- Crossroad model
- Rotary pendulum
- Magnetic levitation
- Khepera II Mobile robot (simulation approach)
- Motor & frequency converter
- Tracked mobile robot
- Flexible Manufacturing System
- Shelf stacker
- Mitsubishi robot
- SEF robot
- Robot soccer player for MiroSot category
- Robotized workplace
- Light system
- Tensometric (strain) scales
Research
CERN
Gallery
Partners
