Center of Modern Control Techniques
and Industrial Informatics
Department of cybernetics and artificial intelligence (DCAI), FEEI, Technical University of Košice
Shelf Stacker
 |
Room:
|
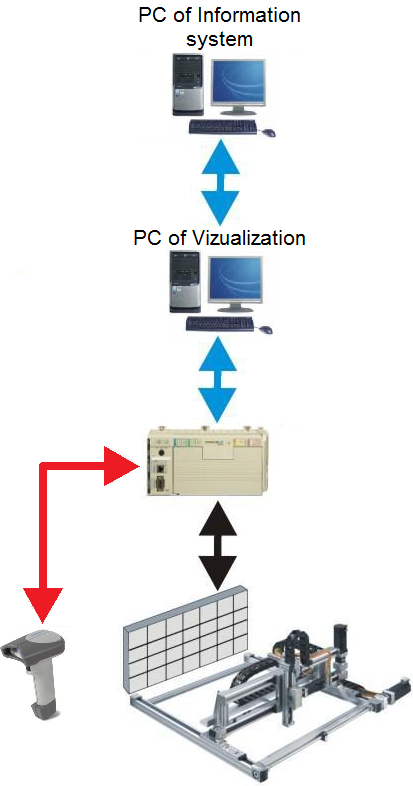
Brief description of the model
- model of automated shelf stacker
- contains of input and output stack, storage and trhee-axis manipulator
- contorlled by PLC CompactLogix L23E
- model illustrates automated intake and outgo of drugs according to prescriptions
- model is vizuliazed in the Intouch enviroment of Wonderware company
- information system secures the intake and outgo request processing
Gallery

|

|
Mechanical realization
- input and output conveyor are driven by DC motor
- three-axes manipulator is driven by stepper motor in the x and y axis directions and by pneumatically in the direction of z axis
- on the head of the manipulator are pneumatic pliers for gripping the drugs
- starage area is firmly built-in with 24 positions
- barcode reader secures the prescription recognition
Interfaces connections of Shelf Stacker:
Using the model in pedagogy
courses
- Distributed Control Systems (1st grade master degree)
bachelor thesis
- JADLOVSKÝ, Igor: Distributed control system of shelf stacker on the technological level
(supervisor: doc. Ing. Ján Jadlovský, CSc., consultant: Ing. Juraj Chovaňák) - 2010
Profile
Infrastructure
Laboratories
Members
Courses
Models
- 32-bit single-chip product
- Flexible Assembly Company
- Ball & Plate CE151
- Ball & Plate B&P_KYB
- Helicopter
- Hydraulic system
- Video camera system
- Crossroad model
- Rotary pendulum
- Magnetic levitation
- Khepera II Mobile robot (simulation approach)
- Motor & frequency converter
- Tracked mobile robot
- Flexible Manufacturing System
- Shelf stacker
- Mitsubishi robot
- SEF robot
- Robot soccer player for MiroSot category
- Robotized workplace
- Light system
- Tensometric (strain) scales
Research
CERN
Gallery
Partners
