Center of Modern Control Techniques
and Industrial Informatics
Department of cybernetics and artificial intelligence (DCAI), FEEI, Technical University of Košice
Distributed Control System Infrastructure at the DCAI FEEI
Infrastructure Description
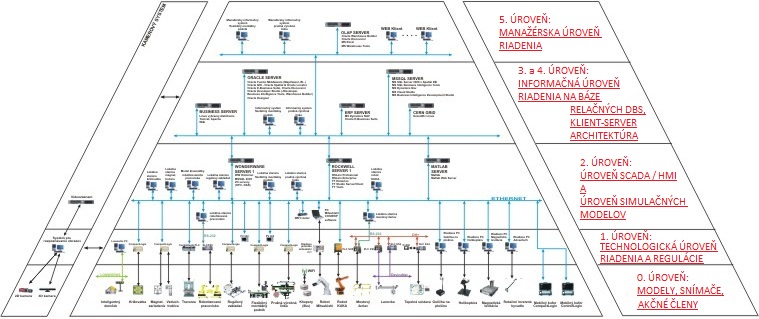
The control pyramid shown in the figure represents the infrastructure of a Distributed Control System (DCS) at the DCAI, FEEI TU of Košice as a model of a complex information and control system built over a set of physical laboratory models, allowing modeling and experimental verification of a wide range of practical tasks in conditions approaching those in practice and in accordance with international standards and recommendations. The said infrastructure was gradually built by the Department employees addressing research projects supported by the world's major companies (Rockwell Automation, Oracle, Wonderware and others) as well as national and international projects, such as the Project of Operational Program of Research and Development financed by the European Regional Development Fund. It is part of the Center for Information and Communication Technologies for Knowledge Systems set up at the FEEI TU of Košice.
Model Workplace
The workplace is composed of physical models of production lines and laboratory educational models of dynamical systems which were integrated into the DCS structures created in the laboratories of the Department. Presently, the existing set of models of physical systems is being expanded with new models (complex industrial production lines, rotary inverted pendulum model, Khepera III mobile robot model), which were obtained from the funds of an ongoing project – Center for Information and Communication Technologies for Knowledge Systems - the first call (Center of Excellence I). All models of real physical systems are driven by the technological process and represents the zero level of the pyramid.
Control System
The control system is integrated into the 5-level pyramid DCS architecture, which allows solving of complex control problems with the emphasis on the links between the different levels. The structure of the distributed system implemented at the DCAI is shown in the figure.
Level 1 (Technological level of control and regulation)
The first level represents a set of means for regulation and control based on programmable logic controllers (PLC) and technological PCs. Devices on this level ensure model regulation and control; model sensors and actuators are connected either via standard technological interfaces (analog I/O, digital I/O, or frequency I/O), or through industrial networks (Probably, DeviceNet, or Profibus).
Level 2 (SCADA / HMI level)
The second level includes SCADA/HMI together with a set of models which were developed to support first-level control. SCADA/HMI supports supervisory control as well as the acquisition, collection and archivation of data from the manufacturing process. Interconnection with the first level of control is usually implemented via the Ethernet TCP/IP interface or other network technology (Profibus, ControNet etc.). Interconnection with the PLC is solved using the OPC server. Linkage to higher, information levels of control is implemented via the Ethernet TCP/IP interface using ODBC communication.
Simulation model levelAt this level, models are implemented either via the Matlab / Simulink programming environment which provides a simulation language together with a set of application toolboxes and supporting means of communication creating interface with SCADA, PLC and RDBS resources, or models are created directly in the Visual C++ environment which relies on specialized libraries to support the actual functionality of the models and communication with other subsystems.
Level 3 (Information level of control based on relational database systems and client-server architecture)
The third level is the MES level (Manufacturing Enterprise Systems), designed to address the performance of production tasks which include production control and records, warehouse management, operational planning, production scheduling, quality control and repair management. It is designed as a relational database system with connected client stations which are realized based on web technologies.
Level 4 (Information level of control based on relational database systems and client-server architecture)
The fourth level supports the ERP/MRP functions (Enterprise Resource Planning/Manufacturing Resource Planning). Since it is implemented using a technology similar to the third level of the infrastructure block diagram, both these levels are identified as Information level of control based on relational database systems. By default, the ORACLE relational database system is employed.
Level 5 (Management control level)
The highest level of the hierarchical structure is the Management control level implemented via multidimensional databases which make use of the OLAP (Online Analytical Processing) technology. In parallel with the principal control pyramid, the DCS structure contains camera-based quality monitoring systems that provide support for the lower levels of control.
Real (laboratory) models of physical systems
These can be divided into several groups in terms of functionality and use.
The first group contains industrial production lines (FAC, FMS), which include pneumatic and electric actuators, three-axis manipulators, robots, intelligent (smart) sensors and actuators, camera systems for the automatic monitoring of production quality, control systems based on programmable logical controllers, SCADA systems and servers with pre-installed database systems. They are arranged so as to allow the creation of model situations in production, evaluation of implemented control at different levels and cross-level communication with real-time functionality.
The second group consists of educational laboratory models of dynamical systems ( CE151 Ball & Plate, CE150 Helicopter and CE152 Magnetic Levitation supplied by Humusoft, a two-tank hydraulic system model, FPM-210/211 rotary inverted pendulum model, Khepera III mobile robots) which allow the following tasks to be solved:
- modeling and dynamical analysis of nonlinear multi-parameter systems using analytical and experimental methods of identification and simulation models of the said systems, implemented into the Matlab / Simulink programming environment,
- algorithmic development of program modules implementing classical and modern control theory methods in the Matlab simulation language intended for solving the defined problems of control of simulation and real laboratory models in selected control structures,
- design of web applications for the presentation of results of modeling and control of simulation and real laboratory models and their implementation into the CyberEduCentre virtual laboratory.
