Centrum moderných metód riadenia
a priemyselnej informatiky
Katedra kybernetiky a umelej inteligencie, FEI, Technická Univerzita v Košiciach
Robotizované pracovisko
 |
Miestnosť:
|
Stručná charakteristika modelu
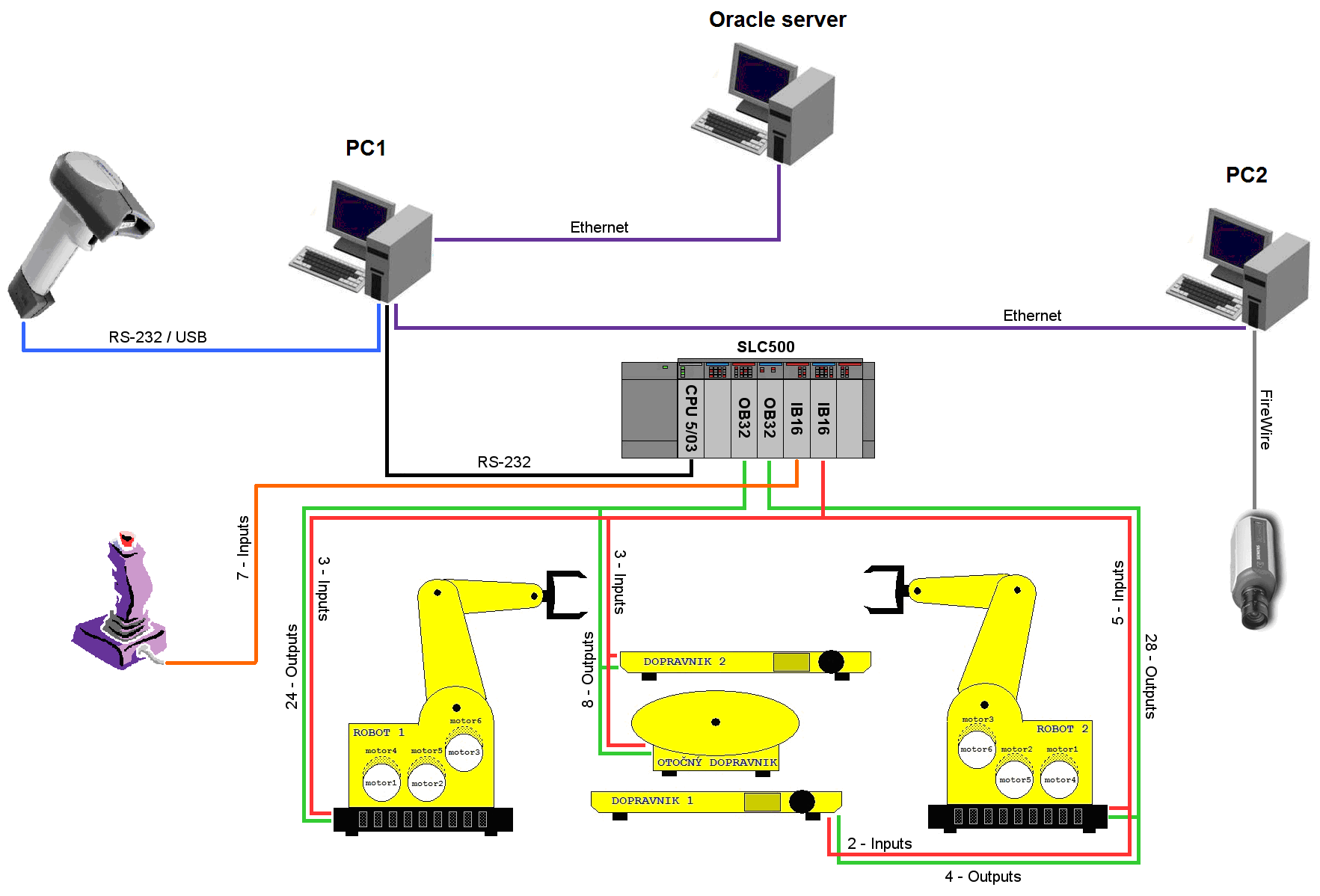
- 2 priemyselné roboty s vlastnými napájacími zdrojmi, 2 dopravníkové pásy, 1 otočný stôl, SLC, napájací zdroj na 12V a 24V
- priemyselné roboty majú 5 stupňov voľnosti, ktoré sú ovládané 6 krokovými motormi
- roboty majú 3 digitálne snímače:
- optický snímač uchopenia
- snímač tlaku
- optický snímač kontoly počiatočnej polohy
- každý dopravníkový pás je poháňaný krokovým motorom
- dopravníkové pásy sú vybavené optickými závorami
- otočný stôl má 8 preddefinovaných zásobníkov na výrobky, je poháňaný krokovým motorom a pozície zásobníkov sú kontrolované laserovým snímačom
Galéria

|

|
Zapojenie robotizovaného pracoviska:
Operačný rozsah robotov
- Os 1: 180° (od -90° do +90°)
- Os 2: 140° (od 0° do +140°)
- Os 3: 170° (od +15° do +185°)
- Os 4: 180° (od -90° do +90°)
- Os 5: 180° (od -90° do +90°)
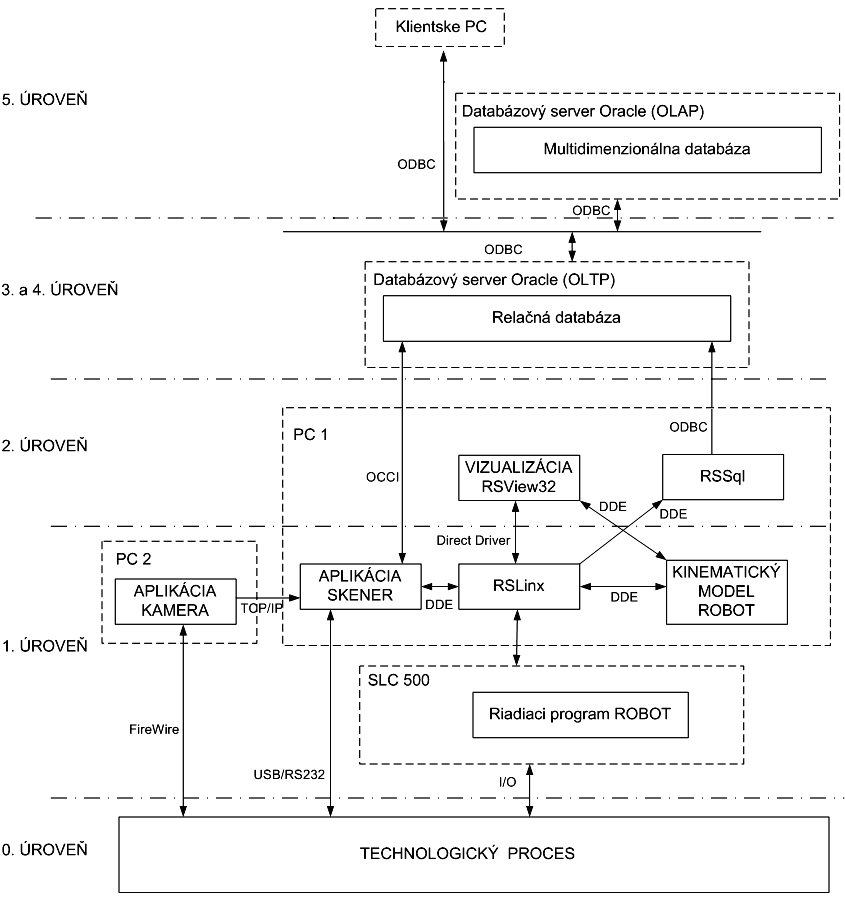
Logická distribuovaná štruktúra robotizovaného pracoviska:
Využitie modelu v pedagogickom procese
predmety
- Distribuované systémy riadenia (1.ročník Ing. štúdia)
riešené diplomové práce
- BUJŇÁK, Patrik: Návrh a realizácia informačného systému k robotizovanej výrobnej linke
(vedúci ZP: doc. Ing. Ján Jadlovský, CSc., konzultant ZP: Ing. Peter Papcun) - 2015 - PETRO, Miroslav: Aplikácia kamerového systému pri riadení robotizovanej výrobnej linky
(vedúci ZP: doc. Ing. Ján Jadlovský, CSc., konzultant ZP: Ing. Peter Papcun) - 2015 - MARCI, Gergo: Návrh a realizácia riadenia modelu robotizovaného pracoviska PLC automatom
(vedúci ZP: doc. Ing. Ján Jadlovský, CSc., konzultant ZP: Ing. Matej Čopík) - 2014 - MARETTA, Ivan: Návrh a realizácia riadenia modelu robotizovaného pracoviska PLC automatom
(vedúci ZP: doc. Ing. Ján Jadlovský, CSc., konzultant ZP: Ing. Matej Čopík) - 2013 - ILKOVIČ, Ján: Návrh a realizácia technologickej úrovne riadenia modelu sústavy manipulátorov
(vedúci ZP: doc. Ing. Ján Jadlovský, CSc., konzultant ZP: Ing. Juraj Chovaňák) - 2009 - HOŠÁK, Rastislav: Informačná úroveň riadenia modelu sústavy manipulátorov
(vedúci ZP: doc. Ing. Ján Jadlovský, CSc., konzultant ZP: Ing. Juraj Chovaňák) - 2009 - KAROĽ, Tomáš: Realizácia komunikačného a vizualizačného softvéru pre riadenie modelu sústavy manipulátorov
(vedúci ZP: doc. Ing. Ján Jadlovský, CSc., konzultant ZP: Ing. Juraj Chovaňák) - 2009 riešené bakalárske práce
- ŠEPENTAL, Patrik: Návrh a realizácia systému rozpoznávania obrazov v rámci riadenia modelu sústavy manipulátorov
(vedúci ZP: doc. Ing. Ján Jadlovský, CSc., konzultant ZP: Ing. Juraj Chovaňák) - 2009 - ŠILON, Marián: Návrh a realizácia systému čiarových kódov pre riadenia modelu technologického pracoviska na báze sústavy manipulátorov
(vedúci ZP: doc. Ing. Ján Jadlovský, CSc., konzultant ZP: Ing. Juraj Chovaňák) - 2009
Využitie modelu v rámci výskumnej činnosti
publikácie
-
2015
PAPCUN, P. - JADLOVSKÝ, J.: Application of image recognition for control of robotized production line. In: Electrical Engineering and Informatics 6 : proceedings of the Faculty of Electrical Engineering and Informatics of the Technical University of Košice. - Košice : FEI TU, 2015 S. 428-432. - ISBN 978-80-553-2178-3 (AED)

Profil
Infraštruktúra
Laboratóriá
Členovia
Predmety
Modely
- 32-bitový jednočipový prípravok
- Flexibilný montážny podnik
- Guľôčka na ploche CE151
- Guľôčka na ploche B&P_KYB
- Guľôčka na ploche B&P_KYB_v2
- Helikoptéra CE150
- Hydraulický systém
- Kamerový systém
- Križovatka
- Kyvadlo FPM-210/211
- Magnetická levitácia
- Aerodynamická levitácia
- Mobilný robot Khepera II simulačný prístup
- Mech. modelový sys. dvoj- rozmerného pohybu častíc
- Motor s frekvenčným meničom
- Pásový mobilný robot
- Pružný výrobný systém
- Regálový Zakladač
- Robot Mitsubishi
- Robot SEF
- Výťah
- Robotická ruka OWI
- Univerzálna robotická platforma - ModBot
- Robotický futbalista MiroSot
- Robotický futbalista MiroSot s kamerou v aplikácii bludiska
- Robotizované pracovisko
- Svetelná sústava
- Lab. pracovisko DCS ALICE - CERN
- Tenzometrické váhy
Výskum
CERN
Galéria
Partneri
